Table of Contents >> Show >> Hide
- What Is a Portable 3D Camera?
- Why Build Your Own Instead of Buying One?
- Core Components You Need
- Choosing the Right 3D Camera Design
- Software Stack for a DIY Portable 3D Camera
- Step-by-Step: Building Your Own Portable 3D Camera
- Step 1: Define the Capture Goal
- Step 2: Pick Matched Cameras
- Step 3: Build a Rigid Mount
- Step 4: Connect the Compute System
- Step 5: Add Power and Storage
- Step 6: Install Capture Software
- Step 7: Calibrate the Cameras
- Step 8: Test Depth Output
- Step 9: Build the Enclosure
- Step 10: Create a Field Workflow
- Lighting Makes or Breaks 3D Capture
- Best Subjects for a First Scan
- Common Problems and How to Fix Them
- Practical Uses for a DIY Portable 3D Camera
- Experience Notes: What Building a Portable 3D Camera Teaches You
- Conclusion
Building your own portable 3D camera sounds like the kind of project that begins with confidence, continues with tiny screws rolling under the table, and ends with you proudly scanning a coffee mug as if you just discovered a new moon. The good news? A homemade 3D camera is absolutely possible today. Affordable camera modules, single-board computers, open-source computer vision libraries, compact batteries, and photogrammetry tools have turned what used to be specialized lab equipment into a realistic weekend-to-several-week project for makers, students, artists, robotics fans, and anyone who has ever looked at a flat photo and thought, “Nice, but where is the depth?”
A portable 3D camera captures more than color. It records or reconstructs spatial information: distance, shape, volume, texture, and sometimes motion. Depending on your design, your DIY 3D camera may use stereo vision, photogrammetry, depth sensors, structured light, time-of-flight sensing, or a hybrid workflow. The most approachable version for many builders is a stereo camera: two synchronized cameras mounted side by side, much like human eyes, feeding images into software that calculates depth from the difference between the two views.
This guide walks through the practical decisions behind building your own portable 3D camera, from choosing hardware to calibrating lenses, designing a rugged enclosure, capturing cleaner scans, and avoiding the classic mistake of building something technically brilliant that can only survive twelve minutes on battery power. Let’s build a 3D camera that can leave the desk without needing emotional support.
What Is a Portable 3D Camera?
A portable 3D camera is a compact imaging device that captures depth data or enough image information to create a 3D model later. Unlike a traditional camera, which records a flat 2D image, a 3D camera tries to understand where surfaces are in space. The final output may be a depth map, point cloud, textured mesh, 3D scan, or stereoscopic image pair.
Common Types of 3D Capture
The main approaches include stereo vision, photogrammetry, structured light, time-of-flight, and LiDAR. Stereo vision uses two cameras separated by a known distance. Photogrammetry uses many overlapping photos taken from different angles and reconstructs geometry through software. Structured light projects a known pattern onto an object and reads how that pattern deforms. Time-of-flight sensors measure how long light takes to bounce back. LiDAR systems use laser pulses to measure distance and are often found in advanced mapping and spatial scanning devices.
For a DIY portable build, stereo vision and photogrammetry are usually the friendliest starting points. Stereo vision can generate real-time depth maps when properly calibrated. Photogrammetry can produce beautiful textured models, especially for static objects, but it usually requires more photos and post-processing.
Why Build Your Own Instead of Buying One?
Commercial depth cameras are impressive, but building your own teaches you how depth capture actually works. You learn about baseline distance, lens distortion, camera synchronization, lighting, calibration, image overlap, processing limits, and the tragic truth that shiny objects are the sworn enemies of 3D scanning.
A DIY portable 3D camera can also be customized. You can choose a wider baseline for outdoor depth, a smaller baseline for close-up objects, global shutter cameras for motion, infrared-sensitive modules for low-light experiments, or a rugged case for field use. If your goal is education, robotics, digital art, 3D printing, archaeology-style documentation, room scanning, or product modeling, building your own system can be more flexible than buying a sealed device.
Core Components You Need
The parts list depends on your chosen architecture, but most DIY portable 3D cameras include the same basic building blocks: image sensors, a compute board, storage, power, a frame, calibration targets, and software.
1. Camera Modules
For stereo vision, you need two matched cameras. Ideally, both modules should have the same sensor, lens, focal length, resolution, and exposure behavior. Mismatched cameras can work, but they add calibration headaches. A pair of Raspberry Pi camera modules, Arducam stereo modules, USB cameras, or machine-vision camera boards can all be used.
Fixed-focus lenses are simpler, while adjustable-focus lenses offer flexibility. Wide-angle lenses capture more scene area but introduce more distortion, so calibration becomes more important. Global shutter sensors are better for moving subjects because they capture the whole frame at once. Rolling shutter sensors are cheaper and common, but they can distort fast motion.
2. Compute Board
A Raspberry Pi, NVIDIA Jetson, mini PC, or compact laptop can run the capture software. Raspberry Pi boards are popular because they are affordable, small, and well supported. A Jetson board is better if you want stronger real-time computer vision performance. A mini PC gives you more processing power but consumes more energy, which matters when your “portable” camera starts behaving like a tiny space heater.
3. Stereo Mount or Frame
The cameras must be mounted rigidly. If they move after calibration, your depth accuracy will suffer. The distance between the camera centers is called the baseline. A wider baseline improves depth sensitivity at longer distances, while a narrow baseline works better for close-up objects. For small object scanning, a baseline around 6 to 10 centimeters is a practical starting point. For room-scale capture, a wider baseline may help.
4. Battery and Power Management
Portability depends on power. A USB-C power bank may be enough for a Raspberry Pi-based system. More powerful boards may need higher-output battery packs. Always check voltage, current, heat, cable quality, and safe shutdown options. A sudden power cut during recording is a great way to invent a new file format called “corrupted sadness.”
5. Storage
3D capture generates a surprising amount of data. High-resolution stereo video, raw image sequences, calibration files, and point clouds can fill storage quickly. Use a reliable microSD card, SSD, or external drive. If you plan to capture outdoors or in the field, bring extra storage and organize files by date, project, camera settings, and calibration profile.
Choosing the Right 3D Camera Design
Before buying parts, decide what your portable 3D camera is supposed to do. A camera for scanning tabletop objects is different from one used for robotics navigation, room mapping, or 3D selfies. Yes, 3D selfies are real, and yes, they will reveal that hair has more geometry than expected.
Option A: Stereo Vision Camera
A stereo vision build is ideal if you want real-time depth estimation. It captures left and right images simultaneously, rectifies them, finds matching features, and calculates disparity. Disparity is the horizontal shift between corresponding points in the two images. Close objects have larger disparity; distant objects have smaller disparity.
Stereo vision works best on textured surfaces. Brick walls, fabric, wood grain, printed objects, and outdoor scenes are usually easier to process. Blank white walls, glass, mirrors, glossy plastic, and black objects can confuse the algorithm. In other words, if your subject looks like it belongs in a minimalist furniture catalog, your depth map may quietly give up.
Option B: Photogrammetry Camera Rig
A photogrammetry-focused portable 3D camera may use one high-quality camera or multiple cameras triggered in sequence. The goal is to collect overlapping images from many angles. Software then reconstructs camera positions and builds a 3D model.
Photogrammetry is excellent for detailed textures and static subjects. It is widely used in cultural heritage, product visualization, gaming assets, design, and 3D printing workflows. The tradeoff is time. You need enough photos, consistent lighting, sharp focus, and careful movement around the subject.
Option C: Hybrid Stereo Plus Photogrammetry
The most versatile DIY setup combines stereo capture with photogrammetry habits. You can use the stereo pair for depth previews and still capture high-quality image sets for offline 3D reconstruction. This approach gives you immediate feedback in the field and better final models later.
Software Stack for a DIY Portable 3D Camera
The software is where your camera becomes more than two lenses taped to a box. At minimum, you need capture software, calibration tools, image processing, and an export workflow.
OpenCV for Calibration and Depth Maps
OpenCV is one of the most important tools for DIY stereo vision. It can calibrate individual cameras, calibrate a stereo pair, correct lens distortion, rectify image pairs, and create disparity maps. Calibration typically uses a checkerboard or other known pattern. The software compares known real-world points with their positions in the images, then estimates camera parameters.
Good calibration requires patience. Capture the calibration target from multiple angles, distances, and positions across the frame. Do not take ten nearly identical photos and expect mathematical magic. Calibration likes variety. Treat the checkerboard like a celebrity on a photo shoot: close-up, wide shot, left side, right side, tilted, centered, and “serious but approachable.”
Depth Processing
Once calibrated, a stereo system can generate depth maps using block matching or semi-global matching. The output may need filtering to reduce noise. Depth maps are often rough around edges and weak on reflective or textureless surfaces. For practical use, you may export a point cloud or combine depth with RGB imagery to create a colored 3D representation.
Photogrammetry Software
For photogrammetry, popular tools include RealityCapture, Agisoft Metashape, Meshroom, COLMAP, and other reconstruction pipelines. The basic workflow is similar: import photos, align images, generate sparse points, build a dense cloud, create a mesh, apply texture, clean the model, and export it.
Photogrammetry quality depends heavily on image overlap. A practical target is high overlap between neighboring images, often around 70% or more for reliable results. More complex objects need more coverage. If the software cannot find enough shared features between photos, the model may split into pieces, twist into abstract art, or produce something that looks like your object had a rough night.
Step-by-Step: Building Your Own Portable 3D Camera
Step 1: Define the Capture Goal
Start with a clear use case. Are you scanning small objects for 3D printing? Capturing depth for a robot? Making stereoscopic videos? Mapping rooms? Creating 3D assets for games? Your goal determines the camera spacing, lens choice, processing board, enclosure size, and software workflow.
Step 2: Pick Matched Cameras
Choose two identical camera modules whenever possible. Match the resolution, lens type, field of view, and exposure settings. If you use autofocus cameras, lock focus during capture. Changing focus after calibration changes the camera model and can reduce accuracy.
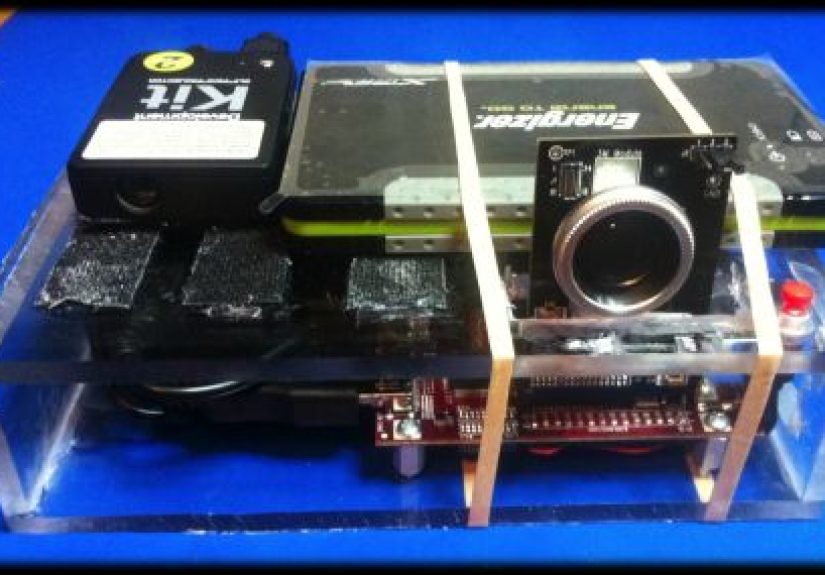
Step 3: Build a Rigid Mount
Use a 3D-printed bracket, aluminum rail, acrylic plate, or machined frame. The mount should prevent flexing. Even tiny movements between cameras matter. Place the cameras horizontally aligned, with lenses parallel. Add mounting holes for a tripod or handle. A portable camera that cannot be held steadily is just a blur generator with ambition.
Step 4: Connect the Compute System
Connect both cameras to your board. Some single-board computers need a stereo HAT, camera multiplexer, or compute module with multiple camera connectors. USB cameras may be easier to connect but can be harder to synchronize perfectly. For still-image photogrammetry, perfect synchronization is less critical. For moving scenes or real-time depth, synchronization matters a lot.
Step 5: Add Power and Storage
Use a battery that can support your board and cameras at full load. Add a power switch, safe shutdown button, and battery indicator if possible. Use fast storage if capturing high-resolution images or video. Keep cables short, secure, and strain-relieved.
Step 6: Install Capture Software
Set up the operating system, camera drivers, and libraries. Test each camera separately before testing stereo capture. Confirm exposure, focus, frame rate, resolution, and file naming. Save left and right images with matching timestamps or frame numbers.
Step 7: Calibrate the Cameras
Print a high-quality checkerboard or calibration pattern and mount it flat. Capture many image pairs from different positions. Use calibration software to estimate intrinsic parameters for each camera and extrinsic parameters between them. Save the calibration file and label it with the exact camera setup. If you change lenses, baseline, focus, or mount geometry, recalibrate.
Step 8: Test Depth Output
Start with simple scenes: a box on a table, a chair in a room, or objects placed at different distances. Check whether the depth map makes sense. Nearby objects should appear closer; flat surfaces should not look like mountain ranges unless your table has recently become a geological event.
Step 9: Build the Enclosure
A good enclosure protects the electronics without blocking ventilation or camera views. Leave access to the battery, storage, ports, and power button. Add a handle, tripod mount, wrist strap, or cold shoe mount for lights. Matte black interior surfaces can reduce reflections near the lenses.
Step 10: Create a Field Workflow
Decide how you will capture, review, name, back up, and process files. A simple field workflow might include: power on, load calibration profile, capture test pair, check exposure, record scan sequence, save project folder, back up to SSD, and mark notes about lighting and distance.
Lighting Makes or Breaks 3D Capture
Lighting is not glamorous, but it is the difference between a clean scan and digital mashed potatoes. Stereo vision needs visible texture. Photogrammetry needs consistent, sharp images. Soft, even lighting is usually best. Avoid harsh shadows, blown highlights, flickering lights, and reflective surfaces.
For small objects, use a light tent or diffused LED panels. For outdoor scanning, cloudy days are often better than direct noon sunlight. For indoor room capture, turn on stable lighting and avoid moving objects. A person walking through your scan may become a mysterious ghost mesh, which is fun once and annoying forever.
Best Subjects for a First Scan
Start with objects that have texture, matte surfaces, and clear shape. Good beginner subjects include shoes, carved objects, tools, small statues, backpacks, rocks, toys, and furniture. Avoid glass cups, chrome objects, glossy black electronics, transparent plastic, and plain white bowls. These are not impossible, but they are advanced-level troublemakers.
Common Problems and How to Fix Them
Problem: Noisy Depth Map
Improve lighting, increase texture, reduce distance, check focus, and recalibrate. Make sure both cameras use similar exposure and white balance settings.
Problem: Photos Will Not Align
Increase overlap, take more angles, avoid motion blur, and add visual detail to the scene. For objects on a turntable, make sure the background does not confuse the software unless the object itself has enough trackable features.
Problem: Scale Is Wrong
Add a known measurement. In stereo vision, scale depends on calibration and baseline accuracy. In photogrammetry, add a ruler, scale bar, coded targets, or measured reference object.
Problem: The Camera Is Not Truly Portable
Reduce power consumption, improve cable management, use a lighter enclosure, and simplify the interface. If the camera needs a keyboard, monitor, wall outlet, and three emotional pep talks, it is not portable yet.
Practical Uses for a DIY Portable 3D Camera
A homemade portable 3D camera can support many creative and technical projects. Artists can capture objects for digital sculpture. Designers can reverse-engineer shapes for prototyping. Teachers can demonstrate geometry, optics, and computer vision. Robotics builders can experiment with obstacle detection. Home improvement fans can document spaces before remodeling. Game developers can create textured assets. 3D printing enthusiasts can scan objects, clean meshes, and print replicas.
The camera does not need to compete with industrial scanners to be useful. A DIY system is valuable because it teaches process. You learn what data is reliable, what conditions ruin a scan, and how software turns images into geometry. That knowledge carries over even if you later upgrade to a commercial depth camera or LiDAR scanner.
Experience Notes: What Building a Portable 3D Camera Teaches You
The first real lesson is that 3D cameras are not just cameras with extra confidence. They are measurement systems. A normal photo can look fine even if the lens has distortion, the angle is odd, or the lighting is dramatic. A 3D camera is far less forgiving. It wants consistency, geometry, stable mounting, and repeatable conditions. This is why the build process often feels half like photography and half like convincing a math professor to approve your shoebox full of wires.
In practice, the most important improvement usually comes from the mount, not the software. Many beginners spend hours adjusting stereo matching parameters while ignoring a flexible camera bracket. If the two cameras shift even slightly between calibration and capture, the math becomes unreliable. A thicker bracket, better screws, or a metal rail can improve results more than another late-night software tweak. The boring mechanical part is secretly the hero.
The second lesson is that calibration should be treated as part of the camera, not a one-time chore. Keep your calibration target clean and flat. Capture enough pattern images. Store calibration files with clear names. If you have different lens settings or baselines, keep separate profiles. When a scan looks strange, recalibration should be one of the first checks, not the final desperate ritual performed after midnight.
The third lesson is that lighting has a personality. Soft light behaves. Harsh light starts drama. Reflective surfaces create false matches. Transparent objects act like they have signed a legal agreement not to be reconstructed. If you are scanning small objects, a simple diffused lighting setup can save hours of cleanup. For field scanning, an overcast sky is a gift. Bright direct sunlight may look pretty to your eyes but can create hard shadows and blown highlights that make reconstruction harder.
Another useful experience is learning to capture with editing in mind. Do not just point the camera and hope. Move slowly. Keep overlap high. Capture extra angles. Take close-ups of detailed areas. Include scale references when measurements matter. Review samples before leaving the location. Nothing builds character like returning home with 400 photos and discovering that the one missing angle was, naturally, the important one.
Portability also teaches discipline. Every added feature costs weight, battery life, complexity, or heat. A screen is useful, but it drains power. A powerful processor is fast, but it may need cooling. A large battery runs longer, but your wrist may file a complaint. The best portable 3D camera is not the one with every possible feature. It is the one you actually carry, set up quickly, and use correctly.
Finally, building your own portable 3D camera changes how you see the world. Surfaces become data. Texture becomes trackable information. Shadows become risk factors. A plain wall becomes suspicious. You begin noticing which objects would scan well and which ones would make your software weep quietly into its log files. That awareness is the real reward. The finished camera is useful, but the understanding you gain is even better.
Conclusion
Building your own portable 3D camera is one of those projects that rewards curiosity, patience, and a willingness to troubleshoot tiny details. The core idea is simple: capture the world from multiple perspectives and use software to estimate depth. The execution, however, depends on careful choices. Matched cameras, a rigid frame, reliable power, strong calibration, good lighting, and a sensible workflow all matter.
Whether you choose stereo vision, photogrammetry, or a hybrid approach, your DIY 3D camera can become a practical tool for scanning objects, experimenting with robotics, creating 3D assets, teaching computer vision, or simply proving that your weekend project can produce more than mysterious cables and a warm Raspberry Pi. Start simple, test often, document your settings, and remember: every weird depth map is not failure. Sometimes it is just your camera politely asking for better lighting.
Note: This article is written for educational and creative DIY purposes. For projects requiring certified measurements, industrial inspection, medical use, or safety-critical navigation, validate results with professional-grade equipment and proper testing standards.